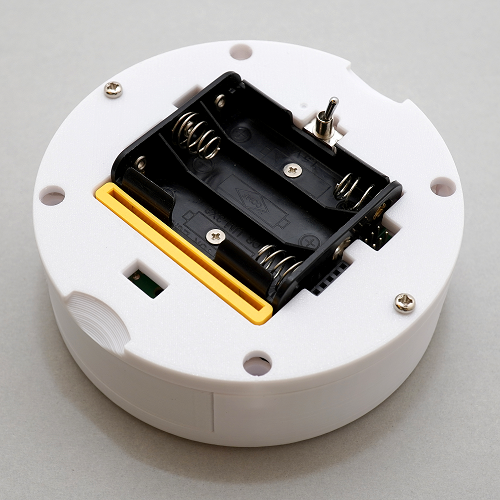
micro:bit用ロボットベース(ラインセンサー)
2023年7月3日出荷分からモーターの制御方法を変更しており、ブレーキ(ピタっと停止する)が使えるようになりました。
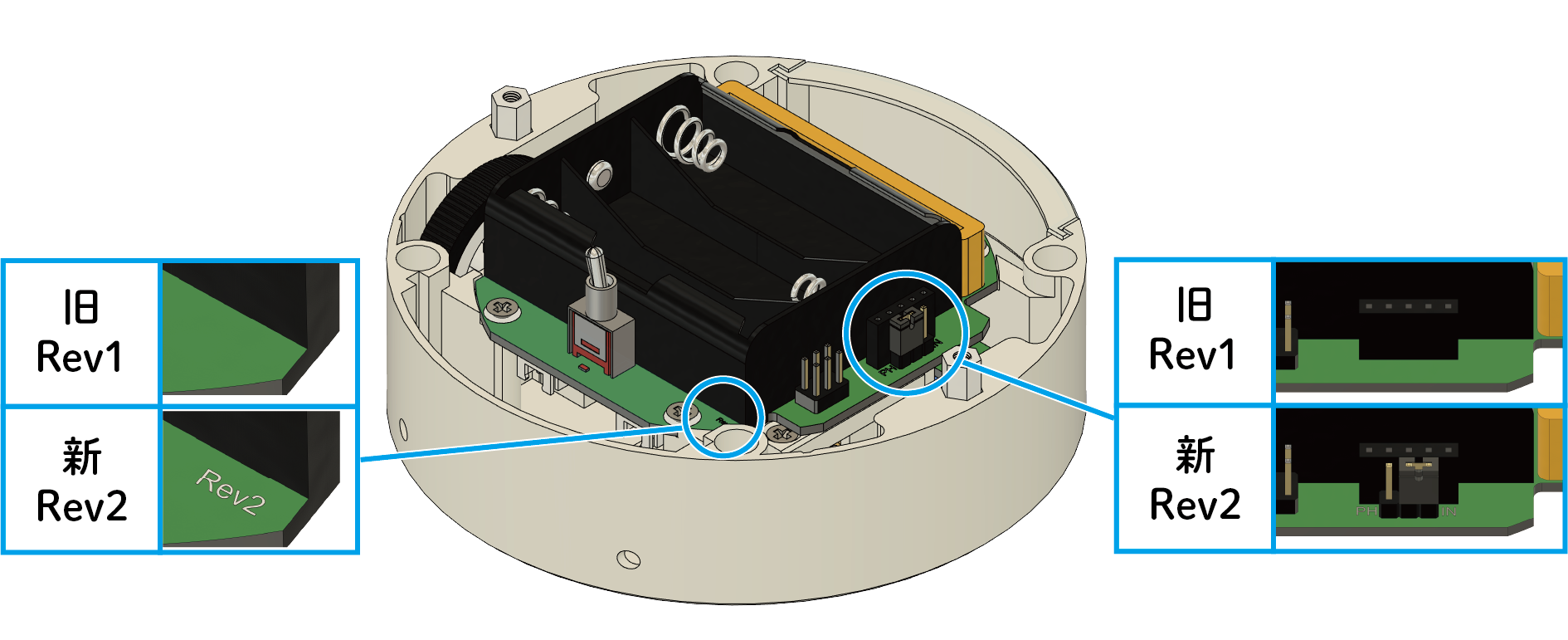
新旧の見分け方
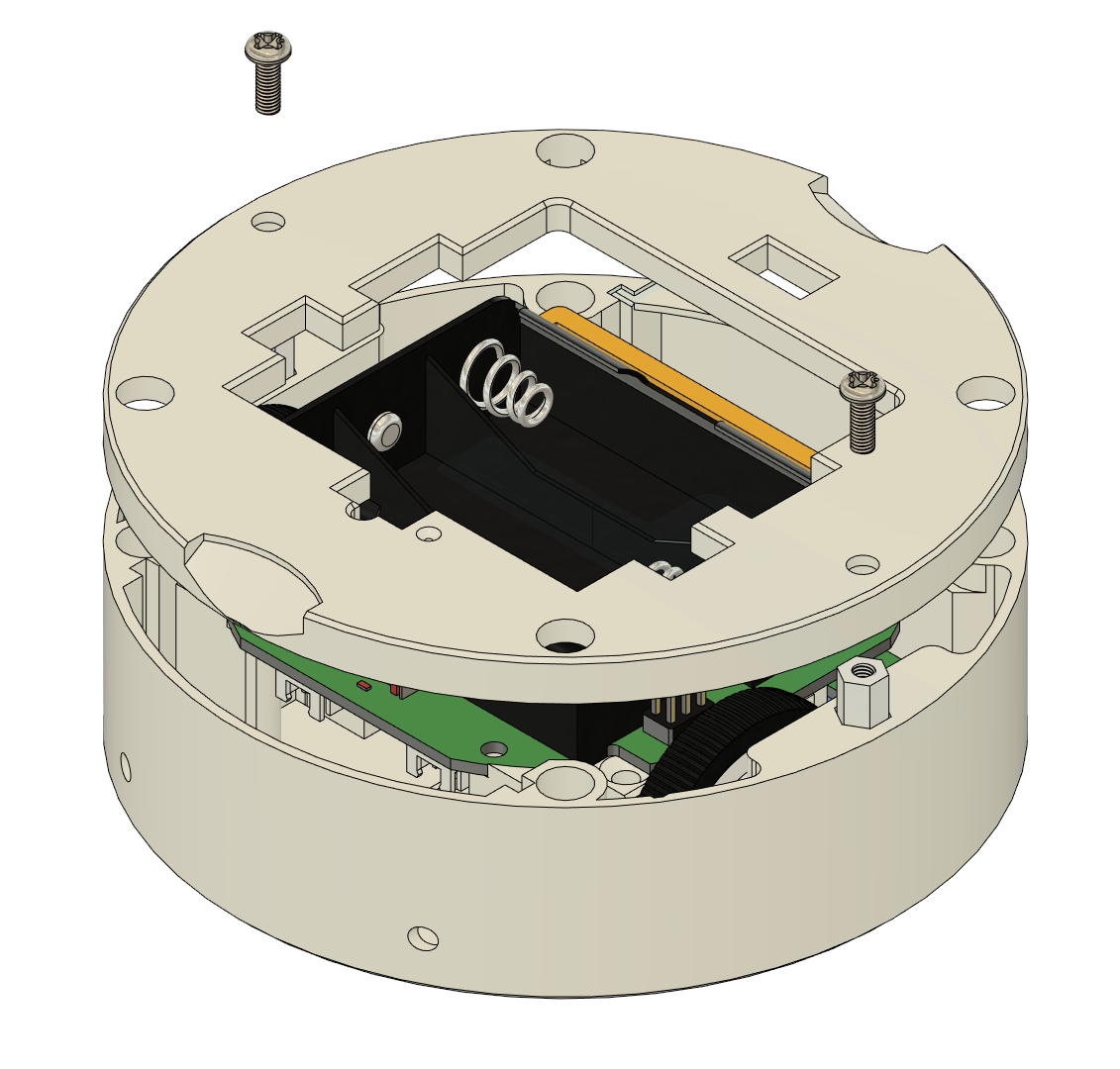
ネジ2本を外し、上蓋を取り外します。
JP8のジャンパーピンがあれば新型、もしくは基板の電池ボックス近くに「Rev2」と印字されていれば新型となります。
電源の入れ方
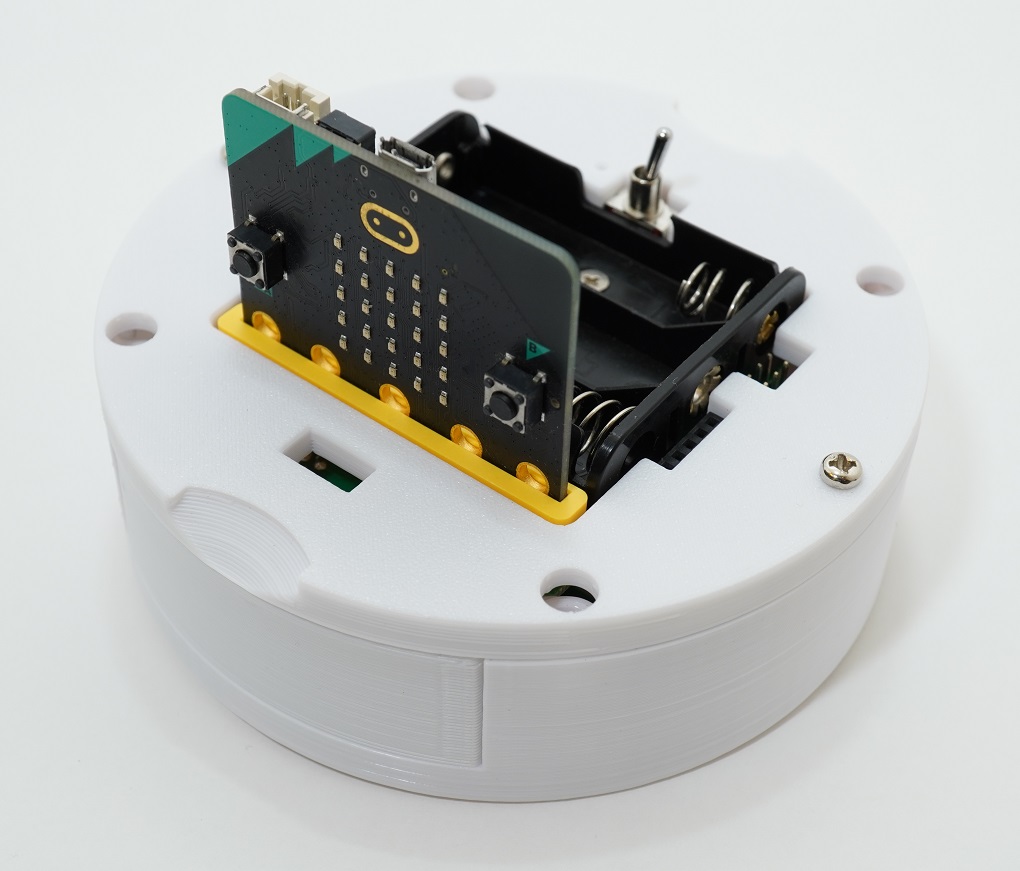
micro:bit は、背面が電池側に向くように装着してください。
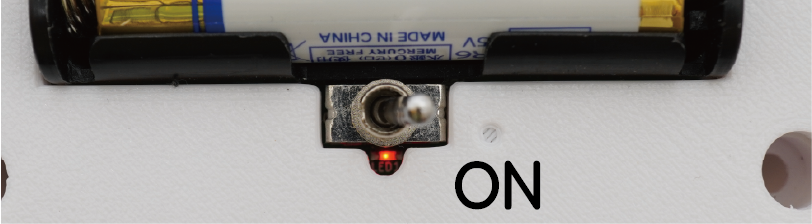
スイッチを ON にすると micro:bit に電源が入り、書き込んだプログラムが動きます。スイッチ横にある、小さな丸い凹みがある方が ON 側になります。電源が入ると、スイッチ下部にある、ケース内のLEDが赤く光ります。
フォトリフレクターについて
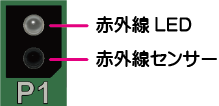
フォトリフレクターには、赤外線を発光する LED と受光するセンサーがついています。
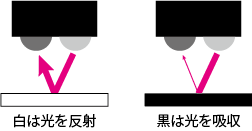
赤外線の反射量でセンサーの値が変化します。反射が大きいほど(白のとき)センサーの値は 0 に近づき、反射が少ないほど(黒のとき)センサーの値は 1023 に近づきます。
この仕組みを利用して、本商品では白色/黒色のラインを検出する機能を作ります。

フォトリフレクターの隣には、調整用トリマー(可変抵抗器)があります。フォトリフレクターを使っていて「感度が高い/低い」と思った場合は感度を調整してください。時計回りに回すと感度が低く(センサーの値が大きく)なります。
新型の仕様・動作確認用プログラム
micro:bit使用ピン番号
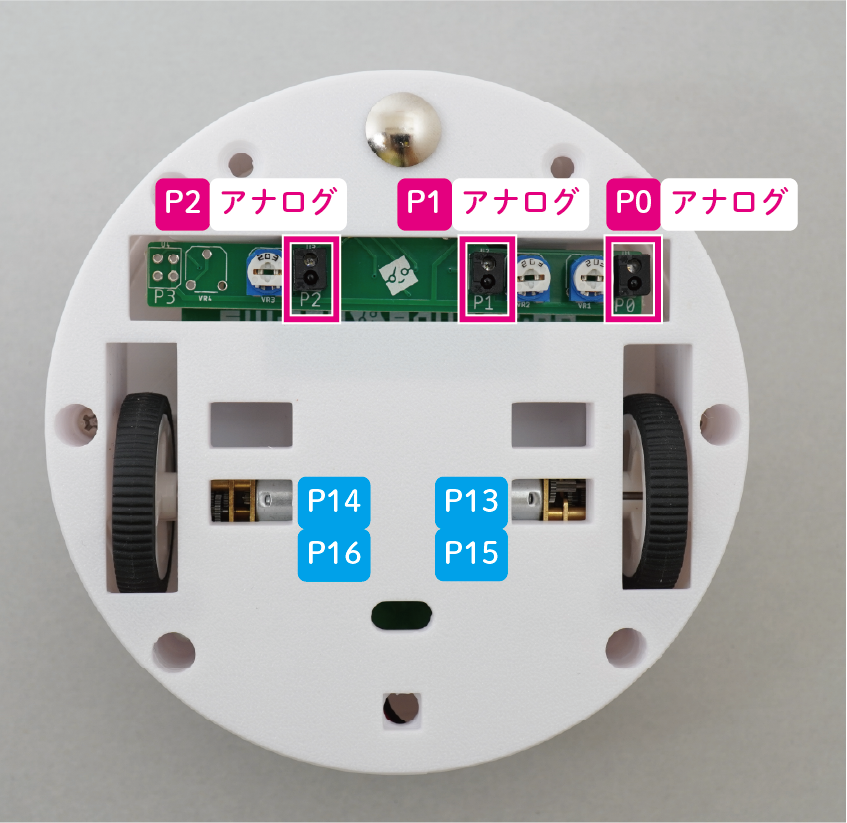
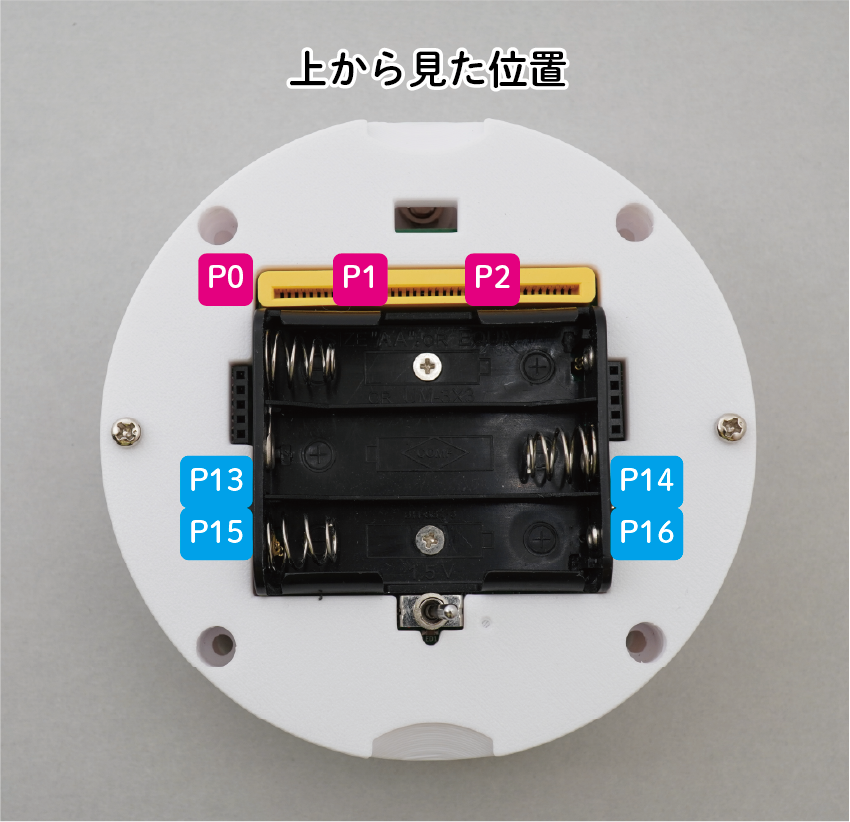
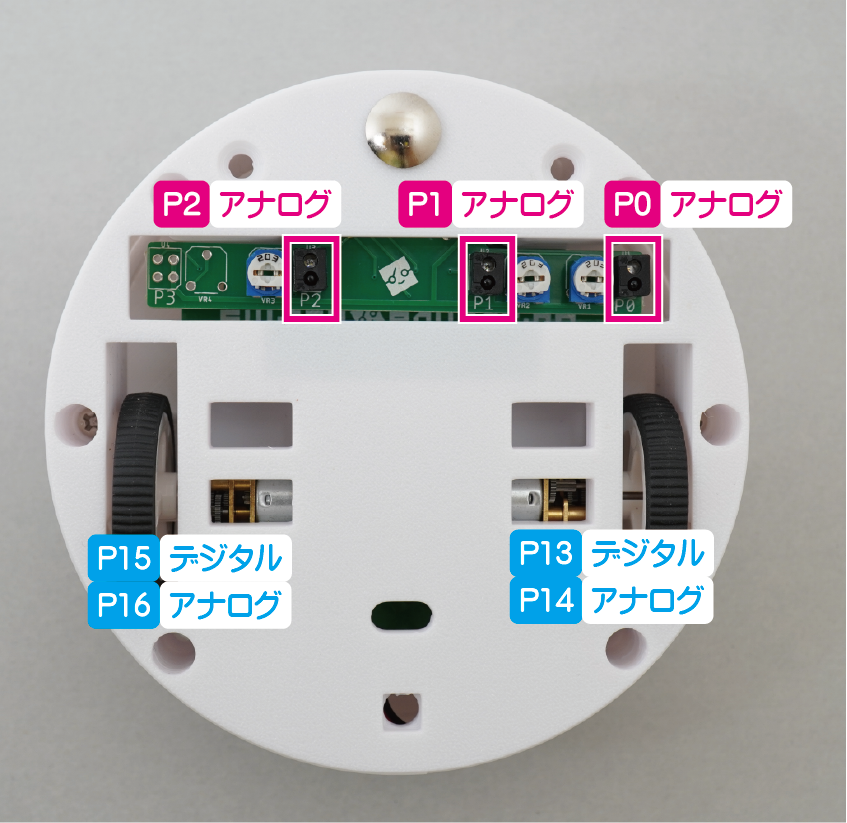
- P0 ~ P2:フォトリフレクター。アナログ値(0〜1023)で読み取ります。
- P13、P15
- P13:デジタル値「0」、P15:アナログ値「0~1023」のとき、画像上方向に回転します。P15でスピードを指定します(数値が大きいほど速く回転)。
- P13:アナログ値「0~1023」、P15:デジタル値「0」のとき、画像下方向に回転します。P13でスピードを指定します(数値が大きいほど速く回転)。
- P14、P16
- P14:デジタル値「0」、P16:アナログ値「0~1023」のとき、画像上方向に回転します。P16でスピードを指定します(数値が大きいほど速く回転)。
- P14:アナログ値「0~1023」、P16:デジタル値「0」のとき、画像下方向に回転します。P14でスピードを指定します(数値が大きいほど速く回転)。
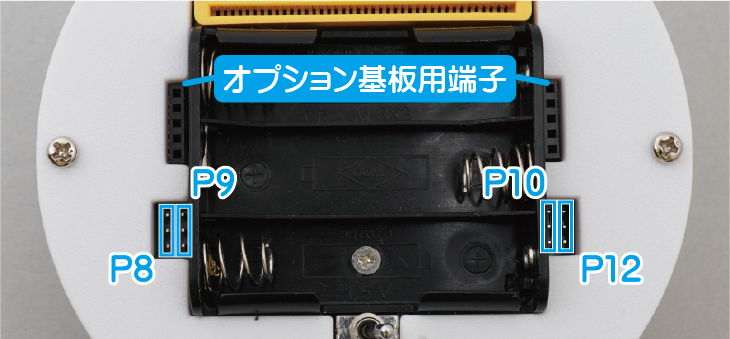
- オプション基板用端子:ロボットベース用フルカラーLEDボード
- P8、P9、P10、P12:サーボモーター用端子。接続できるパーツはこちら(サーボ・LED系)
ブレーキ
旧型ではスピードを「0」にして停止する方法しかありませんでしたが、新型ではブレーキが新たに使えます。ピタッと止めたい場合はブレーキを使ってください。
- P13、P15
- P13:デジタル値「1」、P15:デジタル値「1」でブレーキ
- P14、P16
- P14:デジタル値「1」、P16:デジタル値「1」でブレーキ
動作確認用プログラム
- モーターの動作確認
- micro:bit の ボタン A を押したら1秒走って停止。ボタン B を押したら逆方向に1秒走って停止するプログラム
- MakeCode用プログラム:https://makecode.microbit.org/_djrVhJRRsgxt
- Python用プログラム
- センサーの動作確認
- P1 のセンサーの値が micro:bit の LED 画面に表示されるプログラム
- MakeCode用プログラム:https://makecode.microbit.org/_4oePitWpRK83
- Python用プログラム
※MakeCode用プログラムの開き方はチュートリアルをご確認ください。
旧型の制御方式への切替
ジャンパーピンの接続位置を変更することで、旧型の制御方式に設定することもできます。
ネジ2本を外し、上蓋を取り外します。

ジャンパーピンを「PH」側にすると、旧型の制御方式になります。
旧型(2023年7月2日以前)の仕様・動作確認用プログラム
micro:bit使用ピン番号
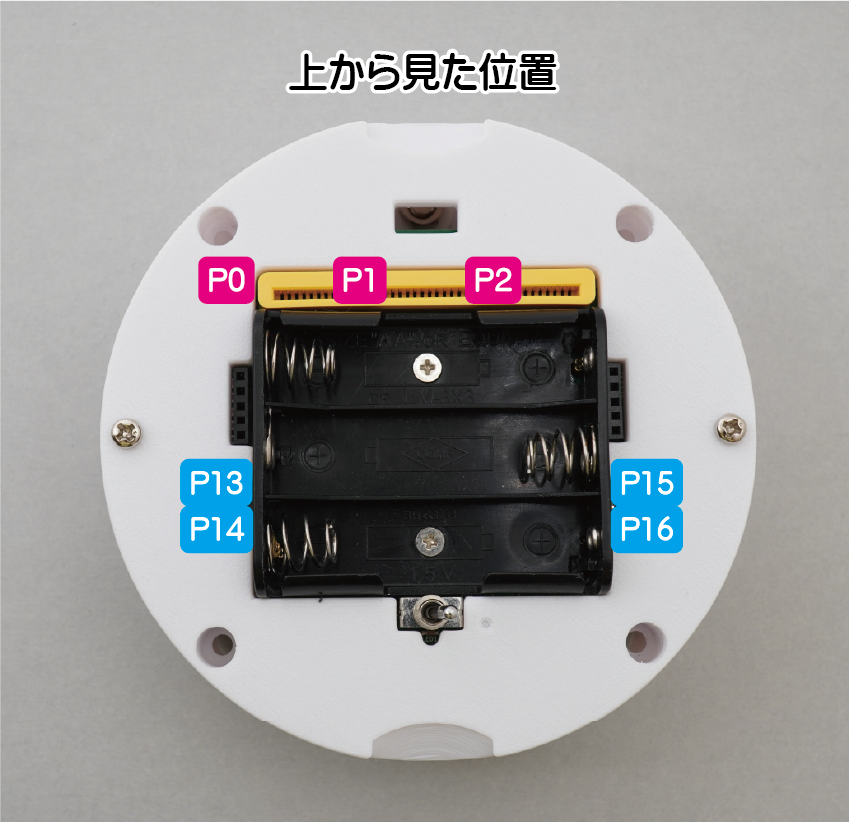
- P0 ~ P2:フォトリフレクター。アナログ値(0〜1023)で読み取ります。
- P13:モーターの回転方向を制御します。デジタル値「0」のとき画像上方向に、「1」のとき画像下方向に回転します。
- P14:モーターの回転スピードを制御します。アナログ値「0〜1023」で指定します。数値が大きいほど速く回転します。
- P15:モーターの回転を制御します。デジタル値「0」のとき画像上方向に、「1」のとき画像下方向に回転します。
- P16:モーターの回転スピードを制御します。アナログ値「0〜1023」で指定します。数値が大きいほど速く回転します。
- オプション基板用端子:ロボットベース用フルカラーLEDボード
- P8、P9、P10、P12:サーボモーター用端子。接続できるパーツはこちら(サーボ・LED系)
動作確認用プログラム
- モーターの動作確認
- micro:bit の ボタン A を押したら1秒走って停止。ボタン B を押したら逆方向に1秒走って停止するプログラム
- MakeCode用プログラム:https://makecode.microbit.org/_8tF2e3YmzMCu
- Python用プログラム
- センサーの動作確認
- P1 のセンサーの値が micro:bit の LED 画面に表示されるプログラム
- MakeCode用プログラム:https://makecode.microbit.org/_4oePitWpRK83
- Python用プログラム
※MakeCode用プログラムの開き方はチュートリアルをご確認ください。
初期不良/保証について
ご購入に関するご案内 > 保証について
をご確認ください。
お問い合わせ
おまとめでの購入をお考えのお客様には、ご要望により個別手配にて対応いたします。 ご購入に関するご案内 をご確認ください。